Autonomous Robotic Exploration and Search
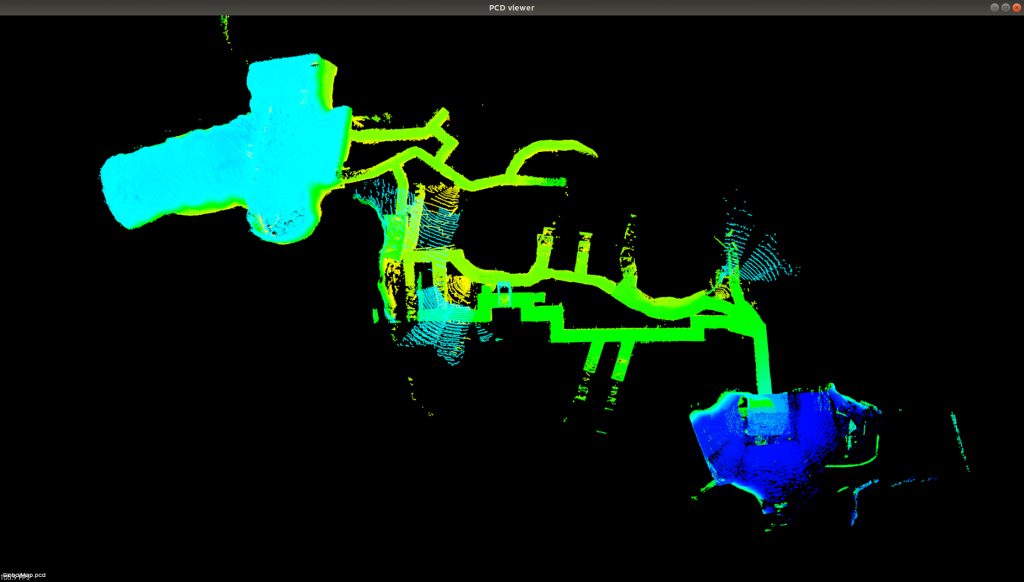
My research group at CSUCI, in collaboration with Coordinated Robotics, is developing a fleet of autonomous ground and air vehicles designed for the purpose of autonomous mapping and search in Global Positioning System (GPS) denied environments. The ground vehicles which are capable of traversing rough terrain and steep slopes are equipped with a Velodyne 3D LiDAR sensor, Intel depth cameras, and wheel encoder odometry sensors. The goal of this research is to develop high-level path planning algorithms for autonomous mobile robots to search and map an unknown environment.
Our team Coordinated Robotics competed in the systems track of the DARPA SubT Challenge Urban Circuit (2020) and Finals (2021).

Related Publications
J.T. Isaacs, K. Knoedler, A. Herdering, M. Beylik, and H. Quintero. Teleoperation for Urban Search and Rescue Applications. Field Robotics, To appear.
A. Herdering, H. Quintero, S. Centento, M. Beylik, and J. T. Isaacs. Deep Reinforcement Learning for Autonomous Search. In Proceedings of the 2021 Computer Science Conference for CSU Undergraduates, March 2021. [ PDF ]
Swarm Robotics
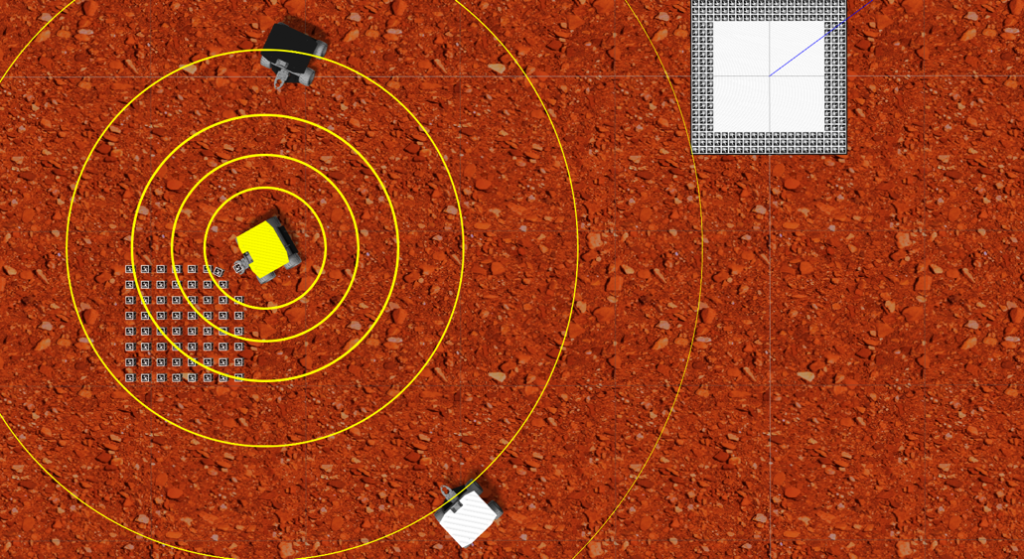
Swarm robotics refers to the concept of using multiple simple autonomous robots to accomplish a task more efficiently than a single more capable robot. Our research in this area is related to the task of Central Place Foraging (CPF) which involves searching for and collecting resources and delivering them to a central depot location.
Our students competed in the NASA Swarmathon Competition from 2016 – 2019.

Related Publications
J. T. Isaacs, N. Dolan-Stern, M. Getzinger, E. Warner, A. Venegas, and A. Sanchez. Central Place Foraging: Delivery Lanes, Recruitment, and Site Fidelity. In Proceedings of the IEEE International Conference on Autonomous Robot Systems and Competitions, ICARSC 2020, April 2020. [ PDF ]
M. U’Ren and J. T. Isaacs. Obstacle Detection and Traversal with Noisy Range Sensors. In Proceedings of the IEEE SoutheastCon 2018, April 2018. [ PDF ]
N. Dolan-Stern, K. Scrivnor, and J. T. Isaacs. Multimodal Central Place Foraging. In Proceedings of the 2nd IEEE International Conference on Robotic Computing (IRC 2018), January 2018. [ PDF ]
Applied Machine Learning
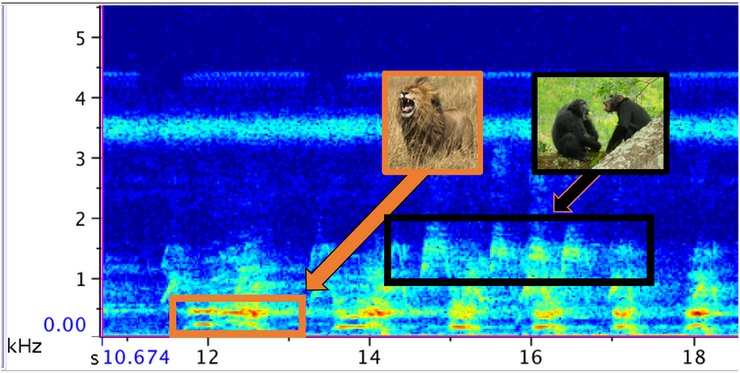
This area of research seeks to apply modern machine learning techniques to interdisciplinary problems. The application areas include brain-computer interfaces, weed detection in turfgrass management, chimpanzee call detection in audio signals, species identification in intertidal zone images, and recipe recommender systems.



Related Publications
P. Chavan, B. Thoms, and J. T. Isaacs. A Recommender System for a Healthy Food Choices: Building a Hybrid Model for Recipe Recommendations using Big Data Sets. In Proceedings of the 54th Hawaii International Conference on System Sciences, HICCS-54, January 2021. [ PDF ]
M. Shah, G. Dilly, K. Meeker, and J. T. Isaacs. Quantifying Intertidal Zone Species Using Semantic Segmentation. In Proceedings of the IEEE International Symposium on Signal Processing and Information Technology, ISSPIT 2018, December 2018. [ PDF ]
Sensor Networks
My interest in sensor networks is twofold. First, how can we efficiently communicate the data from wireless sensor networks to a central location for processing? As part of my Ph. D. thesis, I studied how to use UAV data mules to carry the data in situations where the sensor network is sparsely deployed. More recently, I have started investigating how to use droppable communication nodes to allow autonomous robots to explore further while maintaining communication to the base station. Second, I am interested in using “edge computing” to apply machine learning and signal processing techniques at the sensor node in order to reduce the amount of data that needs to be transmitted over the network.

Related Publications
D. J. Klein, S. Venkateswaran, J. T. Isaacs, T. Pham, J. Burman, J. P. Hespanha, and U. Madhow. Localization with sparse acoustic sensor network using UAVs as information-seeking data mules. ACM Transactions on Sensor Networks, 9(3), August 2013. [ PDF ]
A. S. Crunchant, C. D. Nakka, J. T. Isaacs, A. K. Piel. Acoustic sensors. Conservation Technology, 2021. [ Preview ]